
创新的电磁仿真软件和卓越的技术支持,可缩短设备投放市场的时间并降低成本。
Remcom 软件
Remcom 的产品可协同工作,提供完整准确的结果。
-
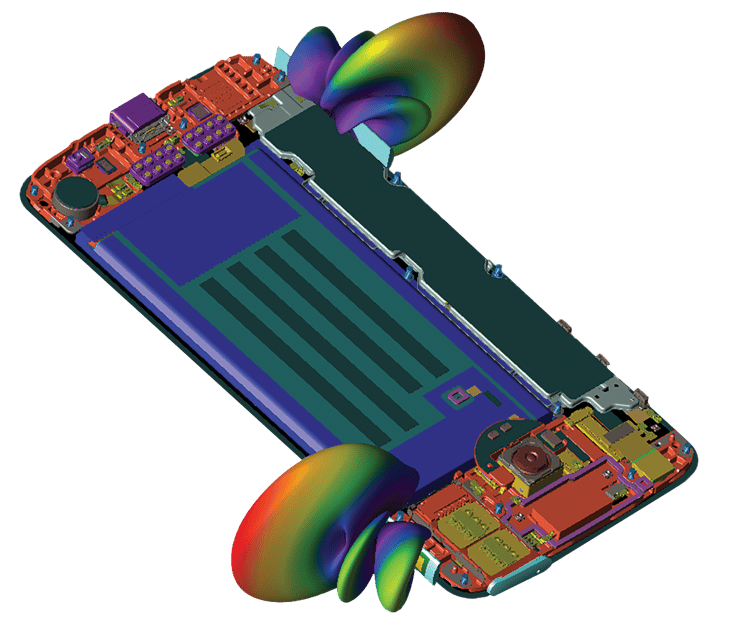
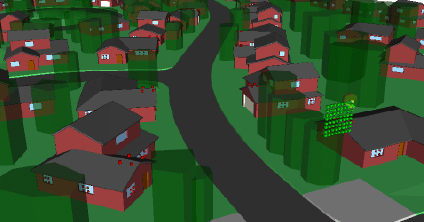
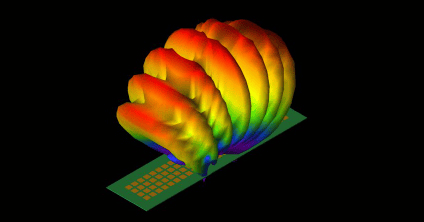
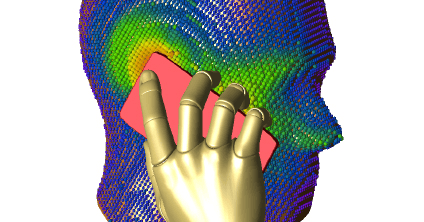
XFdtd® 三维电磁仿真软件
XFdtd 三维电磁仿真软件为工程师提供了强大的工具,帮助他们缩短开发时间,更快地将产品投放市场。 XFdtd 是一款功能全面的电磁仿真求解器,随着未知数数量的增加,它在效率方面超越了其他方法。
进一步了解 XFdtd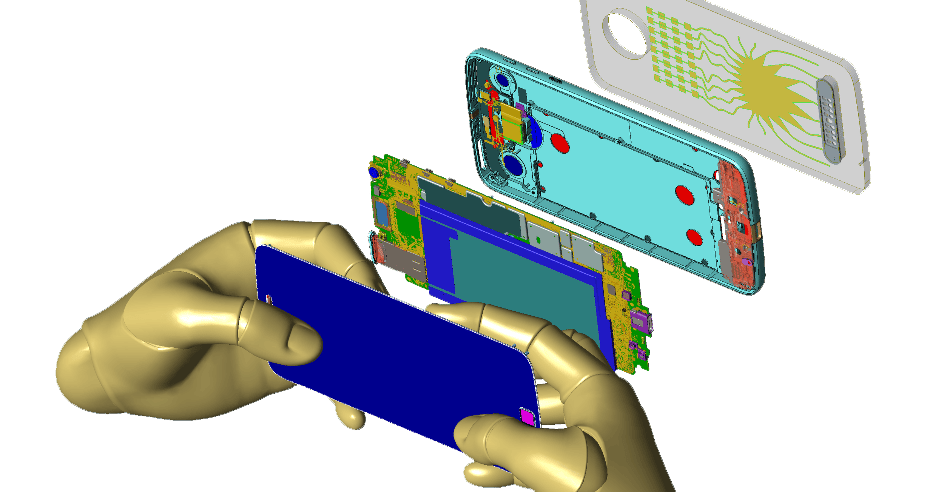
-
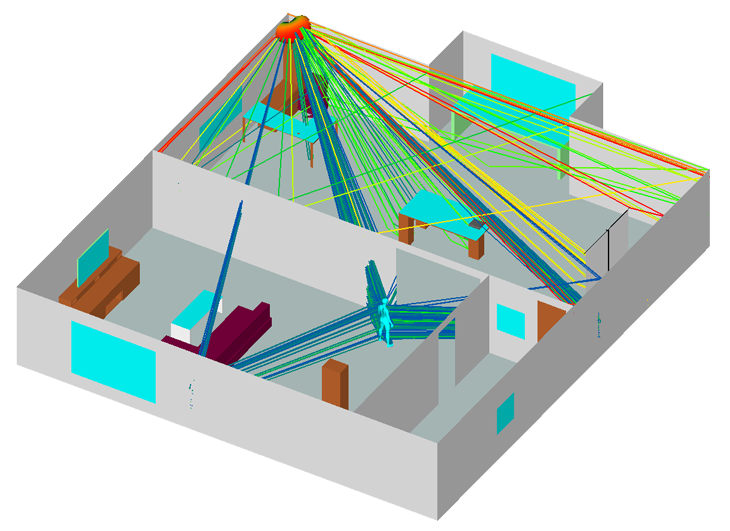
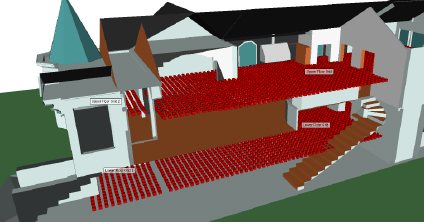
Wireless InSite® 3D 无线预测软件
Wireless InSite 是一套射频传播模型,提供三维射线跟踪、基于射线的快速方法和经验模型,用于分析特定场所的无线电波传播和无线通信系统。通过综合建模、模拟和后处理功能,它能高效、准确地预测复杂的城市、室内、农村和混合路径环境中的电磁波传播和通信信道特性。
进一步了解 Wireless InSite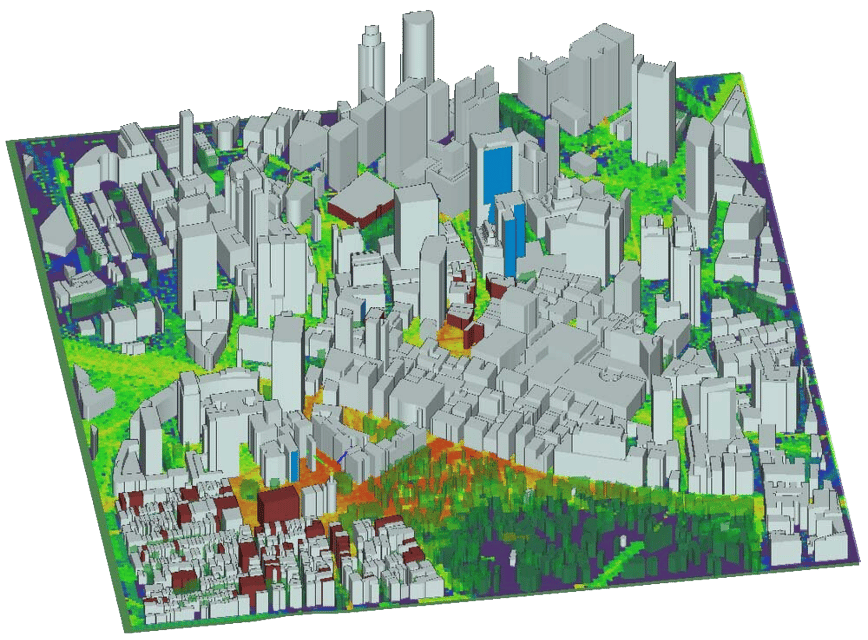
-
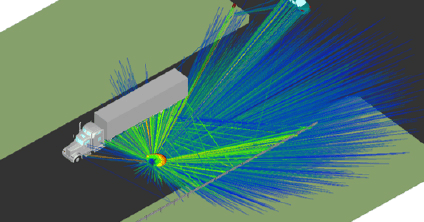
WaveFarer® 雷达模拟软件
WaveFarer 是一款高保真雷达模拟器,可计算雷达系统周围环境中结构和车辆的多径和散射,以及频率高达和超过 100 GHz 的主要大气和散射效应。其应用包括模拟汽车驾驶场景、室内传感器和远场雷达截面 (RCS)。
进一步了解 WaveFarer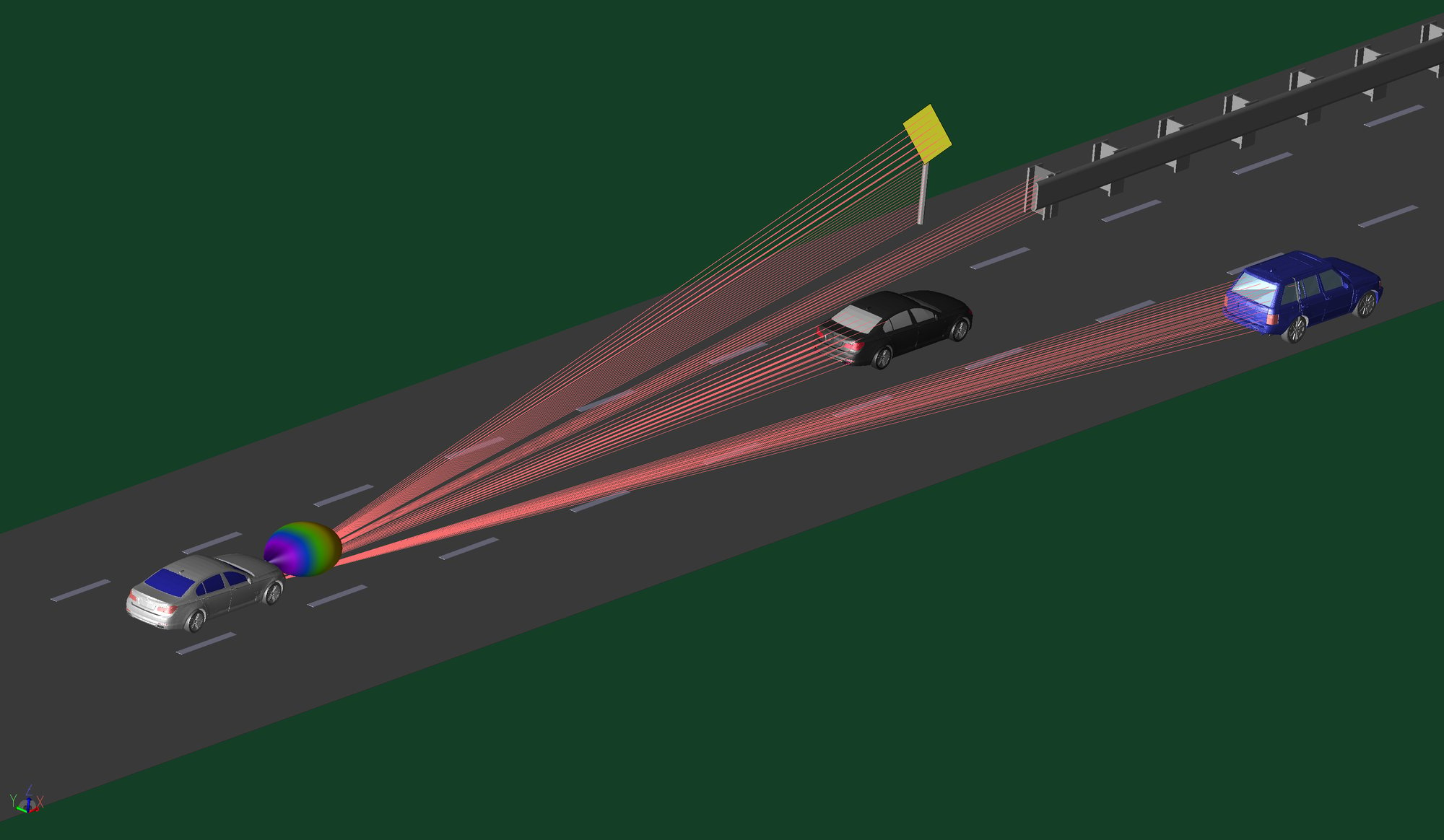
-
XGtd® 用于大型电气平台的远区辐射、RCS 和 EMI/EMC
XGtd 是一种基于射线的电磁分析工具,用于评估车辆或船只对天线辐射的影响、预测天线之间的耦合以及预测雷达截面(RCS)。 它非常适合频率较高或平台非常大的应用,在这些应用中,全物理方法的要求可能会超出可用的计算资源。
进一步了解 XGtd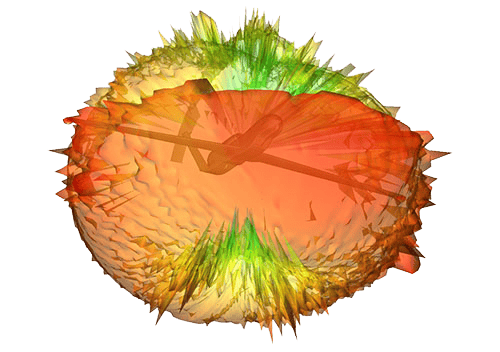

愉快的业务协作--这与您选择的软件同样重要。